Journals and Conference Papers
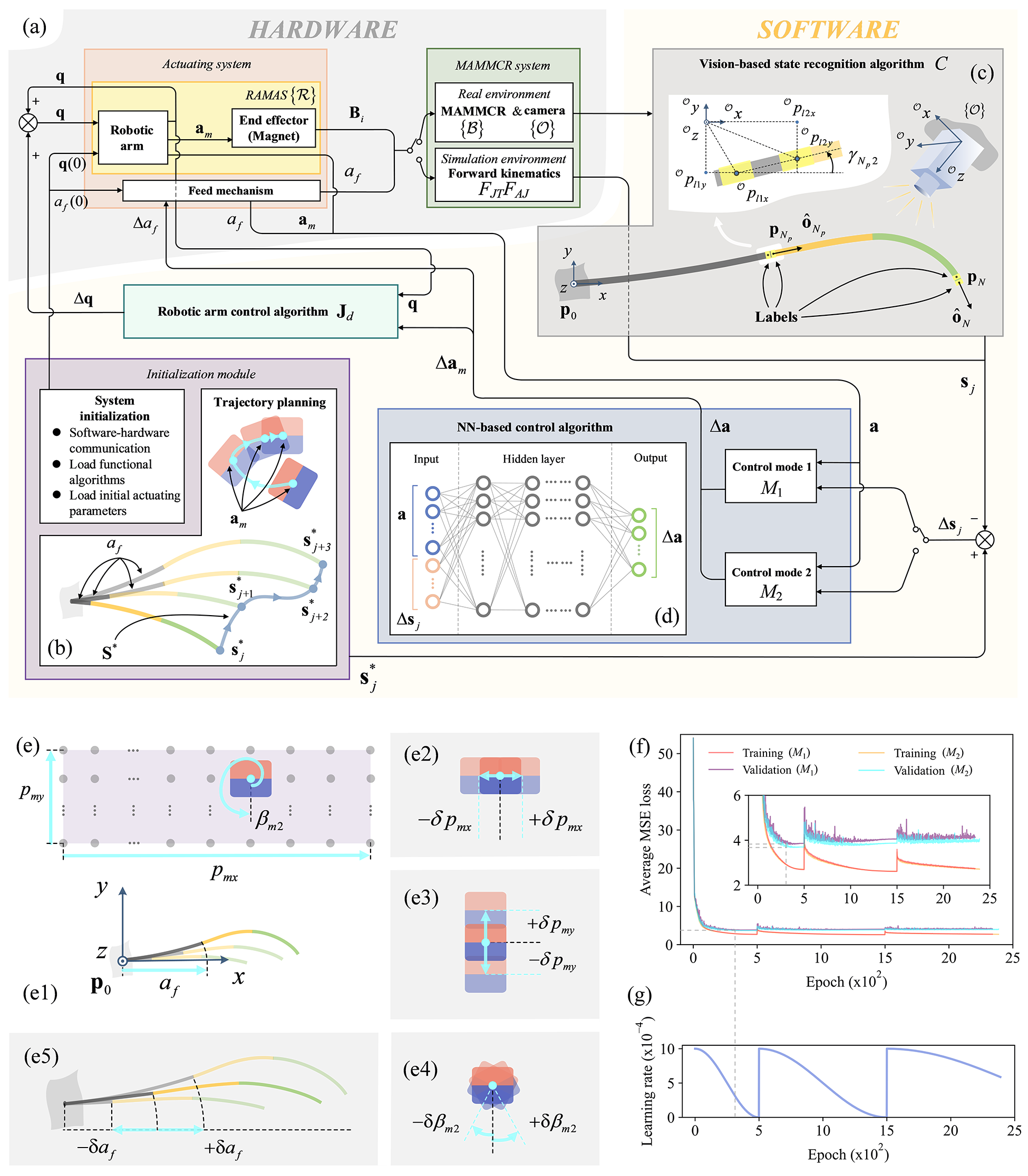
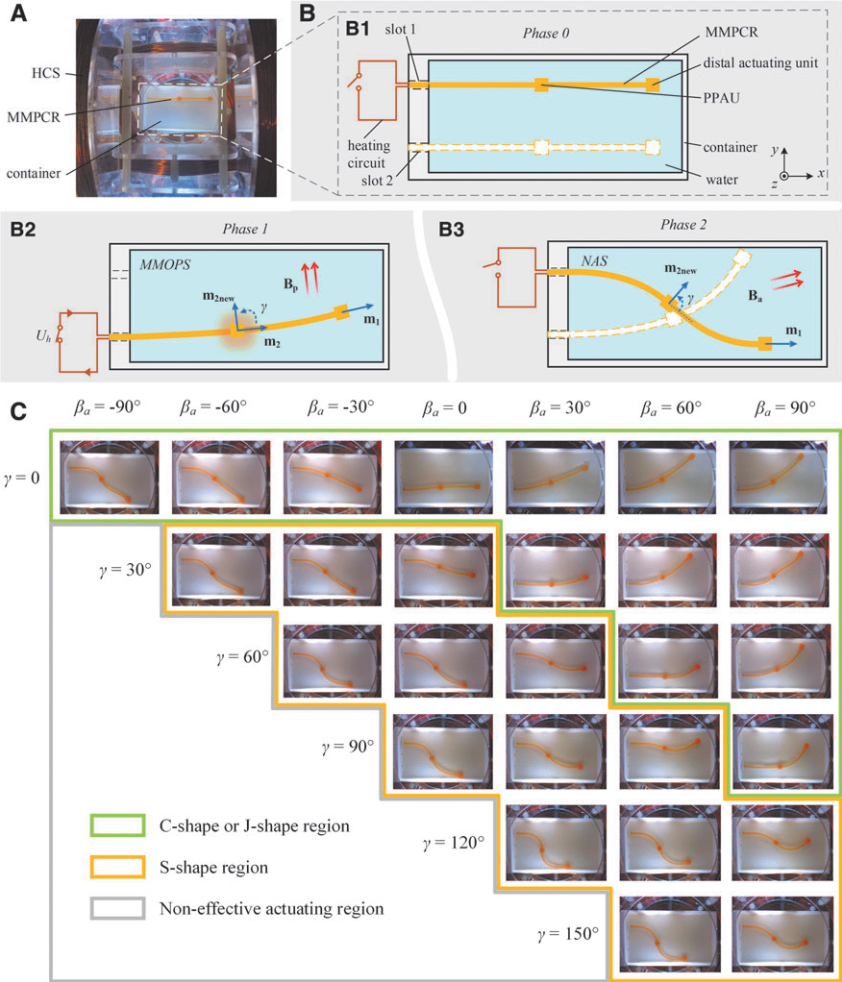
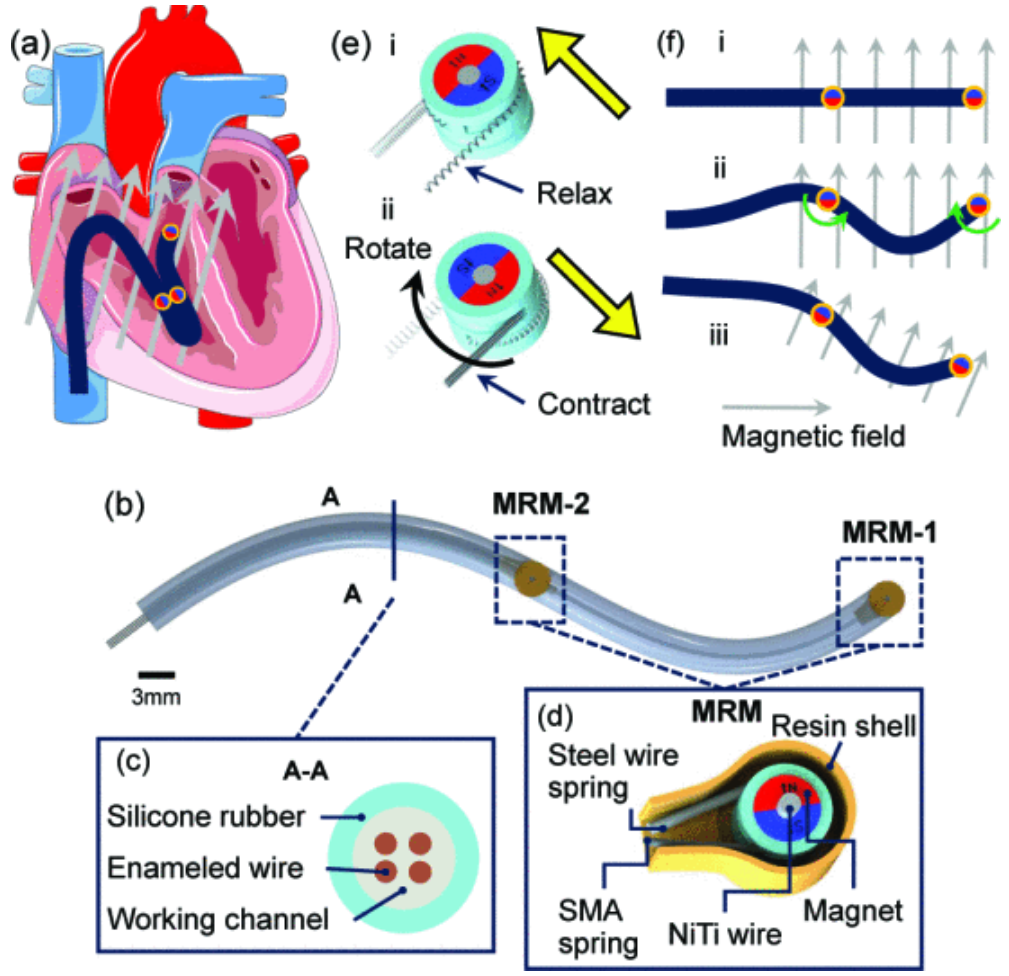
Y. Cao, Z. Yang, B. Hao, X. Wang, M. Cai, Z. Qi, B. Sun, Q. Wang, L. Zhang*. Magnetic continuum robot with intraoperative magnetic moment programming. Soft Robotics. 2023, vol. 10(6), pp. 1209-1223. DOI: 10.1089/soro.2022.0202. LINK
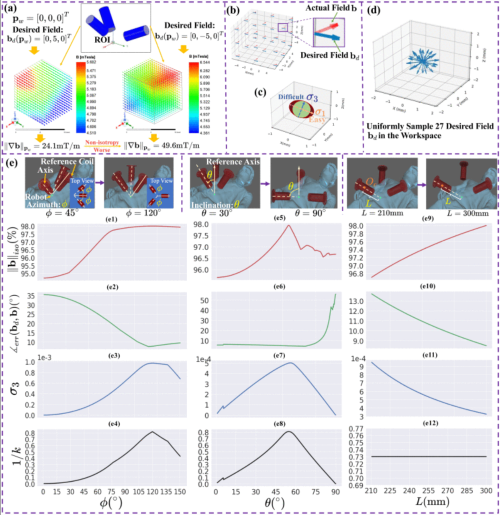
M. Cai, Z. Qi, Y. Cao, X. Liu, X. Wu, T. Xu*, L. Zhang*. Performance-Guided Rotating Magnetic Field Control in Large Workspaces With Reconfigurable Electromagnetic Actuation System. IEEE Transactions on Robotics. 2024, vol. 40, pp. 4117-4131. DOI: 10.1109/TRO.2024.3453768. LINK (🔥Highlighted in 机器人大讲堂)
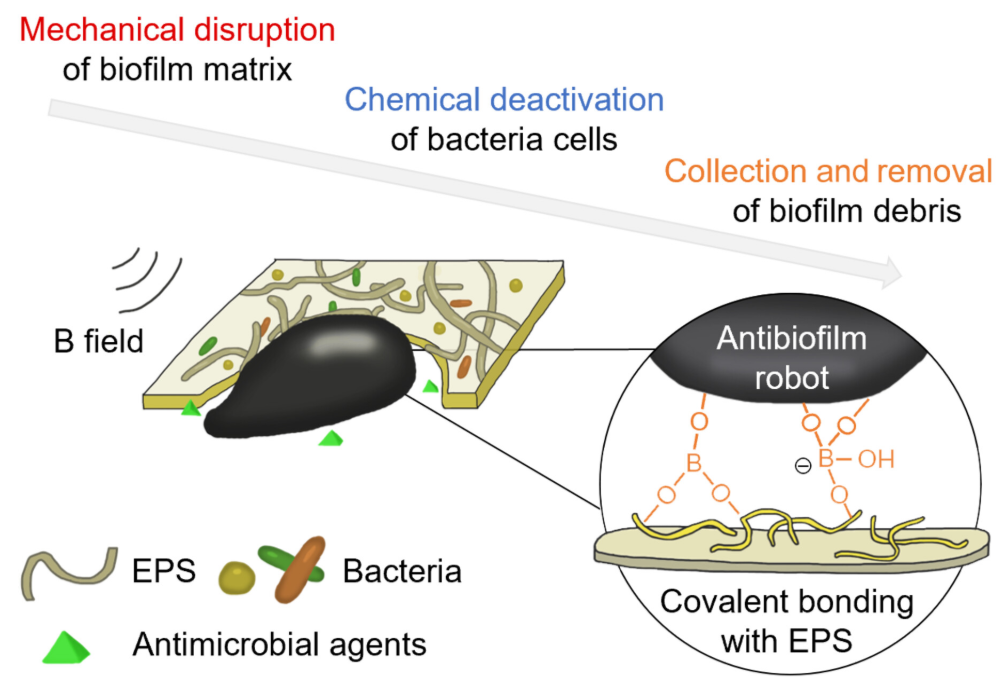
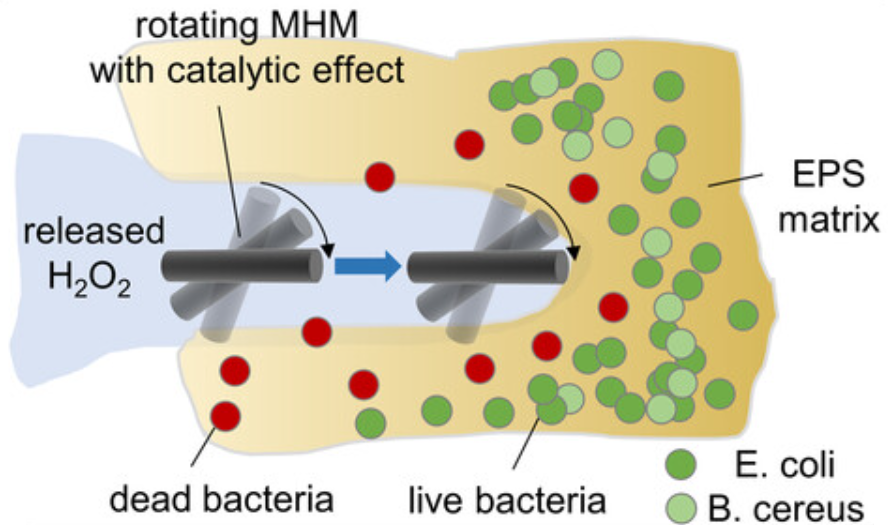
B. Sun, J. Guo, B. Hao, Y. Cao, T. K. F. Chan, M. Sun*, J. J. Y. Sung*, L. Zhang*. Liquid-bodied antibiofilm robot with switchable viscoelastic response for biofilm eradication on complex surface topographies. Science Advances. 2025, vol. 11: eadt8213. DOI: 10.1126/sciadv.adt8213. LINK (🔥Highlighted in 高分子科学前沿)
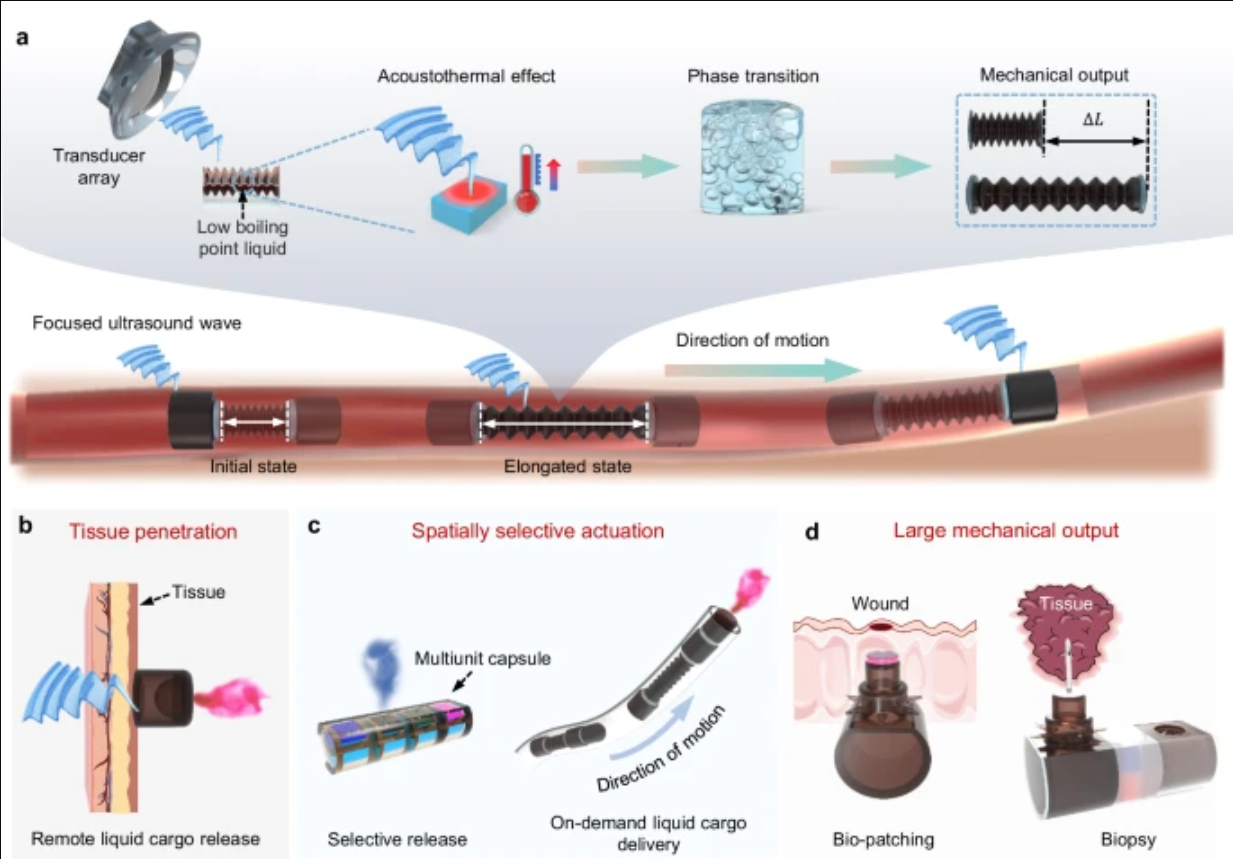
B. Hao, X. Wang, Y. Dong*, M. Sun, C. Xin, H. Yang, Y. Cao, J. Zhu, X. Liu, C. Zhang, L. Su, B. Li*, L. Zhang*. Focused ultrasound enables selective actuation and Newton-level force output of untethered soft robots. Nature Communications. 2024, vol. 15(1): 5197. DOI: 10.1038/s41467-024-49148-6. LINK (🔥Highlighted in 高分子科学前沿)
M. Cai, Z. Qi, Y. Cao, X. Wu, T. Xu*, L. Zhang*. Magnetic Field-Priority Force Control for Automated Manipulation in Large Workspaces With Reconfigurable Electromagnetic Actuation System. IEEE Transactions on Industrial Electronics. 2024. DOI: 10.1109/TIE.2024.3426055. LINK
M. Cai, Z. Qi, Y. Cao, X. Wu, T. Xu*, L. Zhang*. Development of reconfigurable electromagnetic actuation system with large workspaces: Design, optimization, and validation. IEEE Transactions on Automation Science and Engineering. 2024. DOI: 10.1109/TASE.2024.3435035. LINK
Z. Yang, H. Yang, Y. Cao, Y. Cui, L. Zhang*. Magnetically actuated continuum medical robots: a review. Advanced Intelligent Systems. 2023, vol. 5(6): 2200416. DOI: 10.1002/aisy.202200416. LINK (🔥TOP 10 Most-Cited Article in 2023)
Z. Qi, M. Cai, B. Hao, Y. Cao, L. Su, X. Liu, K. F. Chan, C. Yang, L. Zhang*. Robust 3-D Path Following Control Framework for Magnetic Helical Millirobots Subject to Fluid Flow and Input Saturation. IEEE Transactions on Cybernetics. 2024, vol. 54(12), pp: 7629-7641. DOI: 10.1109/TCYB.2024.3439708. LINK
J. Xue, M. Zhang, X. Liu, J. Zhu, Y. Cao, L. Zhang*. A Magnetic Continuum Robot with In-situ Magnetic Reprogramming Capability. 2024 IEEE International Conference on Robotics and Automation (ICRA). 2024, pp: 5891-5897. DOI: 10.1109/ICRA57147.2024.10611450. LINK
B. Sun, M. Sun*, Z. Zhang, Y. Jiang, B. Hao, X. Wang, Y. Cao, T. K. F. Chan*, L. Zhang*. Magnetic hydrogel micromachines with active release of antibacterial agent for biofilm eradication. Advanced Intelligent Systems. 2023, vol. 6(2): 2300092. DOI: 10.1002/aisy.202300092. LINK (🔥Highlighted in Advanced Science News)
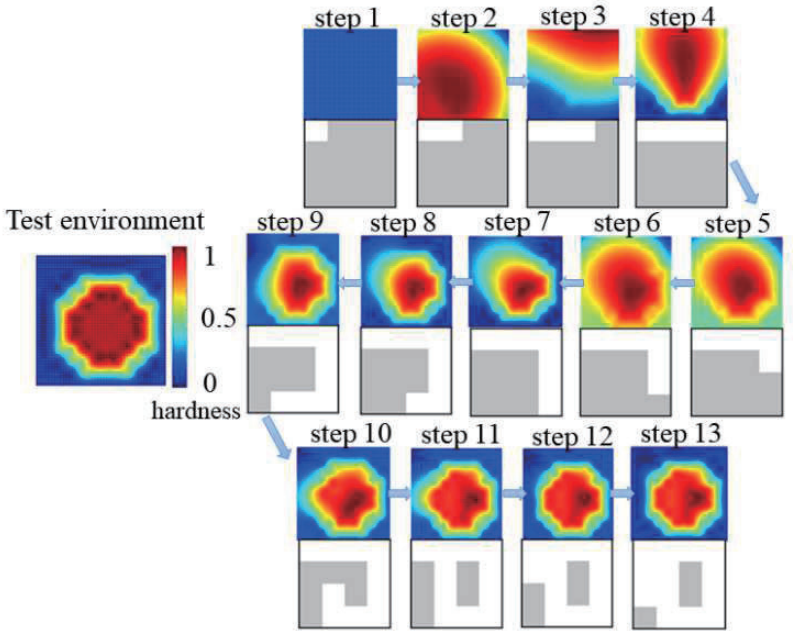
F. Ju*, H. Ye, D. Bai, Y. Zhang, C. Zhu, Y. Cao, W. Yue. Autonomous tumor palpation and resection path planning using tactile array sensor and deep reinforcement learning for surgical robot. 2022 IEEE International Conference on Robotics and Biomimetics (ROBIO). 2022, pp. 871-876. DOI: 10.1109/ROBIO55434.2022.10012022. LINK
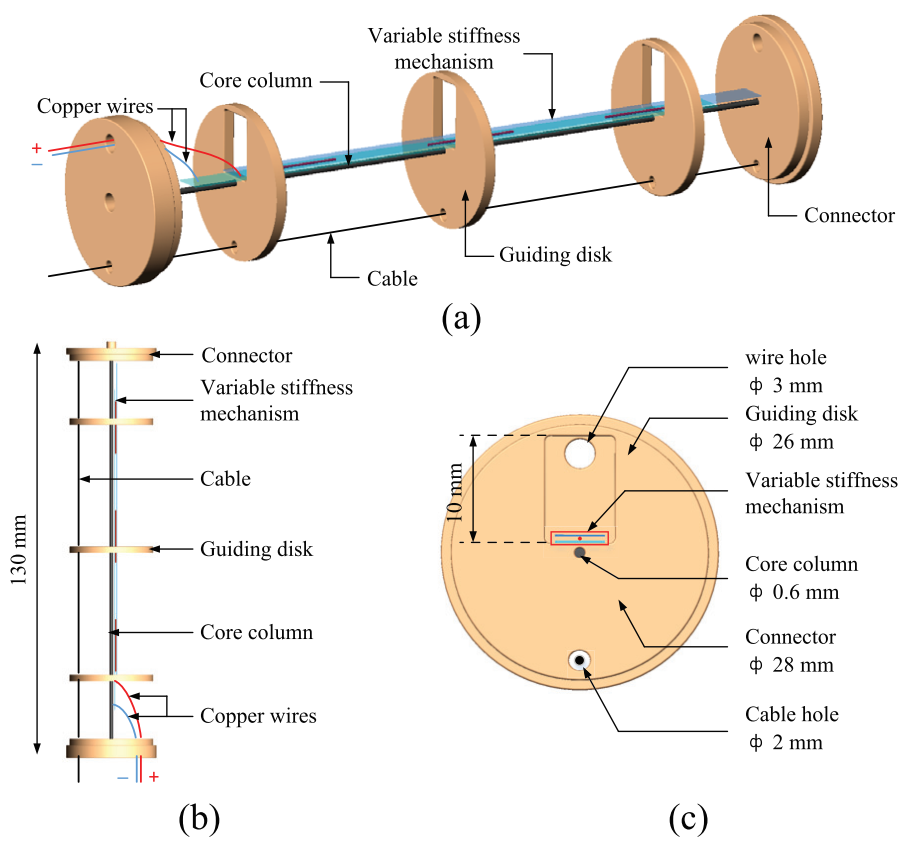
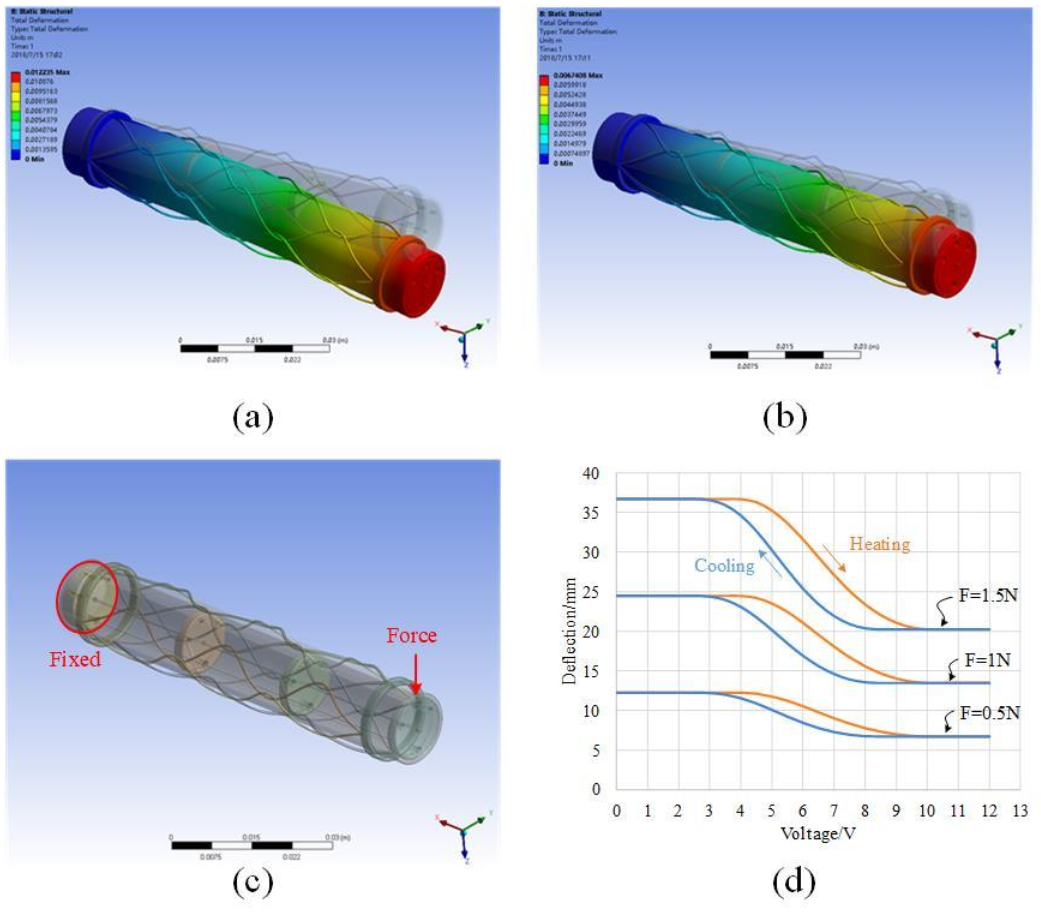
Y. Cao, F. Ju, L. Zhang, D. Bai, F. Qi, B. Chen*. A novel variable-stiffness flexible manipulator actuated by shape memory alloy for minimally invasive surgery. Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine. 2018, vol. 232(11), pp. 1098-1110. DOI: 10.1177/0954411918802922. LINK
Y. Cao*, F. Ju, B. Chen. A novel variable stiffness continuum manipulator with a SMA-based sheath for minimally invasive surgery. 2018 International Academic Conference for Graduates, NUAA (IACGN, 2018). Oct. 18-19, 2018, Nanjing, China, vol. 5, pp. 26-31. (Best Paper Award) LINK
S. Jiang, B. Chen*, F. Qi, Y. Cao, F. Ju, D. Bai, Y. Wang. A variable-stiffness continuum manipulators by an SMA-based sheath in minimally invasive surgery. The International Journal of Medical Robotics and Computer Assisted Surgery. 2020, vol. 16(2), pp. 1-11. DOI: 10.1002/rcs.2081. LINK
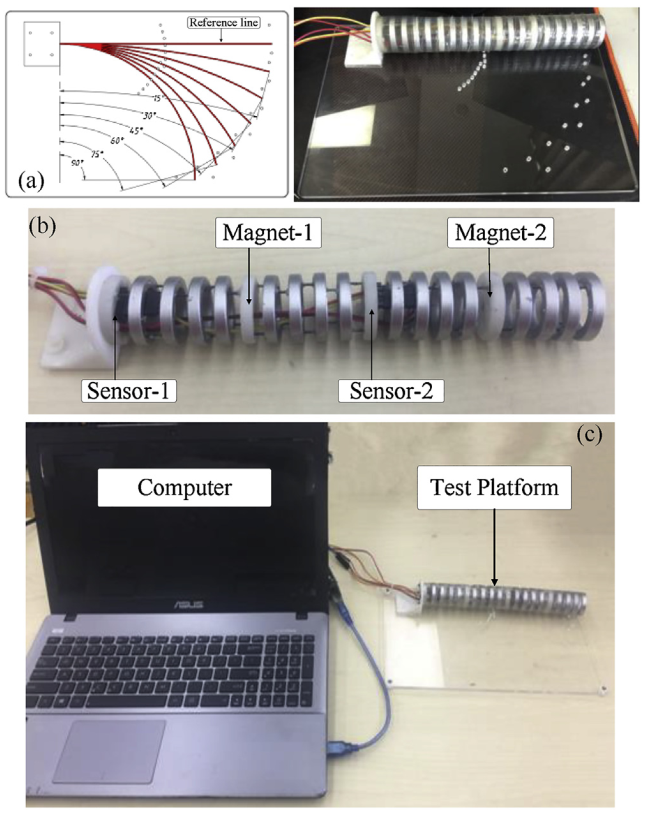
H. Guo, F. Ju, Y. Cao, F. Qi, D. Bai, Y. Wang, B. Chen*. Continuum robot shape estimation using permanent magnets and magnetic sensors. Sensors and Actuators A: Physical. 2019, vol. 285, pp. 519-530. DOI: 10.1016/j.sna.2018.11.030. LINK
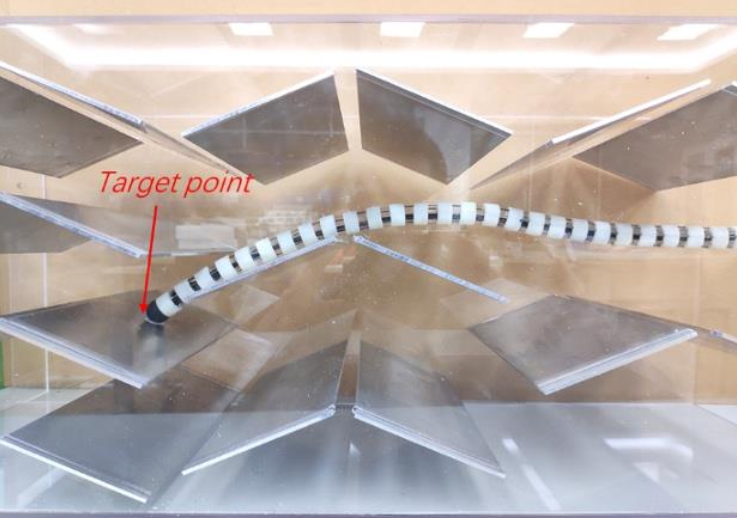
Y. Wang, F. Ju, Y. Cao, Y. Yun, Y. Wang, D. Bai, B. Chen*. An aero-engine inspection continuum robot with tactile sensor based on EIT for exploration and navigation in unknown environment. IEEE 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). Jul. 8-12, 2019, Hong Kong, China, pp. 1157–1162. DOI:10.1109/aim.2019.8868485. LINK
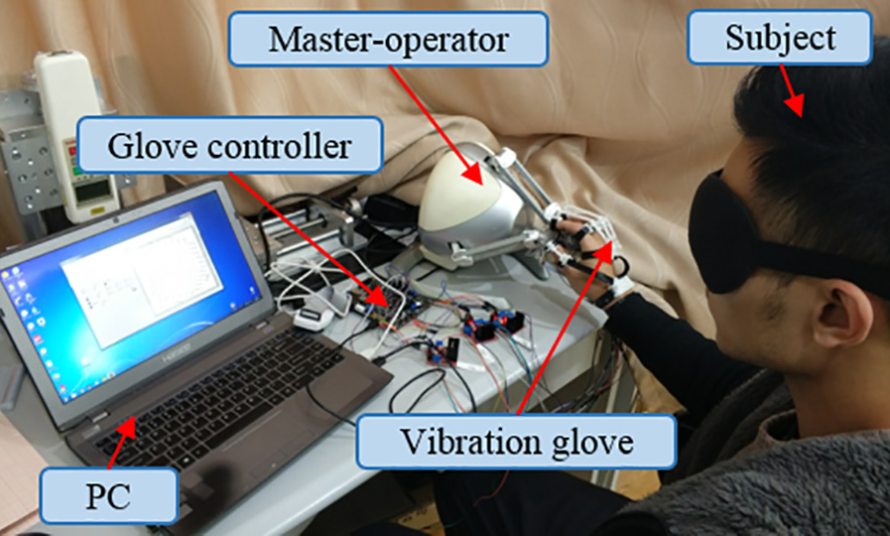
D. Bai, F. J, F. Qi, Y. Cao, Y. Wang, B. Chen*. A wearable vibrotactile system for distributed guidance in teleoperation and virtual environments. Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine. 2019, vol. 233(2), pp. 1-10. DOI: 10.1177/0954411918821387. LINK
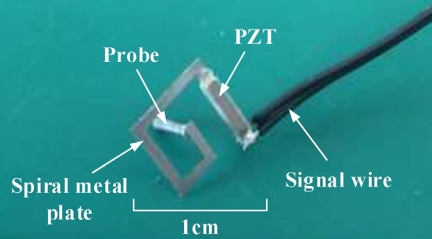
L. Zhang, F. Ju, Y. Cao, Y. Wang, B. Chen*. A tactile sensor for measuring hardness of soft tissue with applications to minimally invasive surgery. Sensors and Actuators A: Physical. 2017, vol. 266, pp. 197-204. DOI: 10.1016/j.sna.2017.09.012. LINK
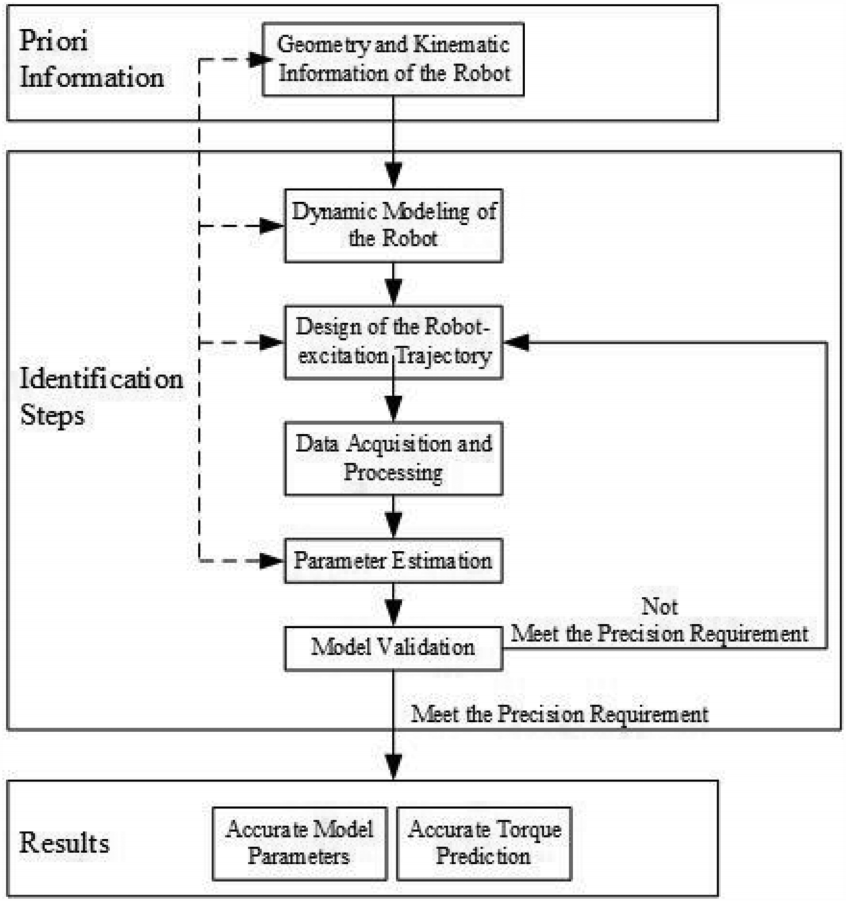
S. Jiang, M. Jiang, Y. Cao, D. Hua, H. Wu, Y. Ding, B. Chen*. A typical dynamic parameter identification method of 6-degree-offreedom industrial robot. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering. 2017, vol. 231(9), pp. 740-752. DOI: 10.1177/0959651817726477. LINK
2022-Now
2017-2020